
-
GEneric NEural control for Self-organized emergent behavIor of limbed Systems (GENESIS, Smart motor control software)
-
Flexible, Soft Object Manipulation
-
Online Neural Learning and Adaptation
-
Bio-inspired Robot Structure Design with Hybrid Rigid-Soft Material
Research Highlights
2023

Exploiting extrinsic resources for deformable (flexible) object manipulation in a complex shoe rackaging task
For more details, see Dong et al., ICARM 2023

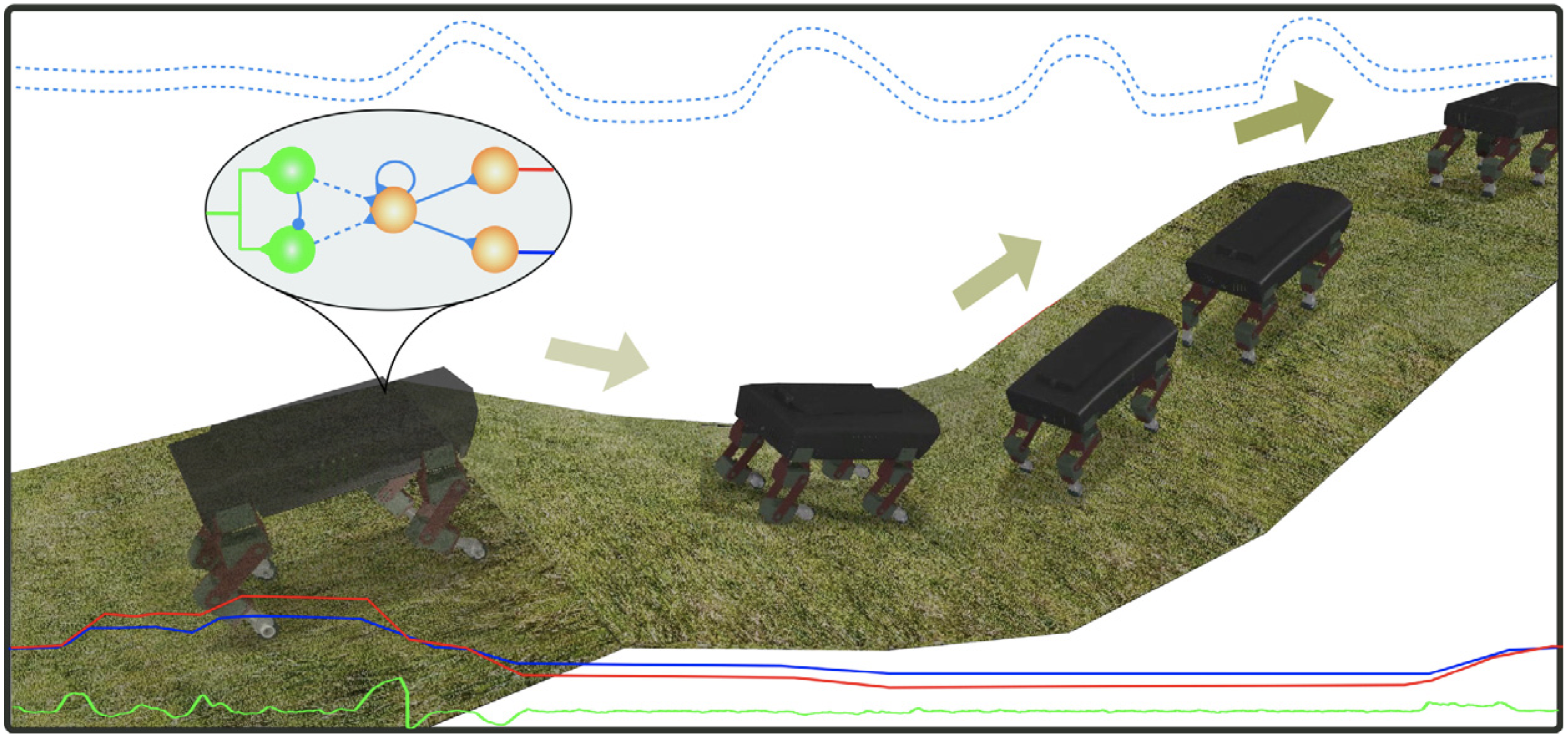
Hybrid learning mechanisms under a neural control network for motor memory and robust locomotion of quadruped robots
For more details, see Zhang et al., Neural networks 2023
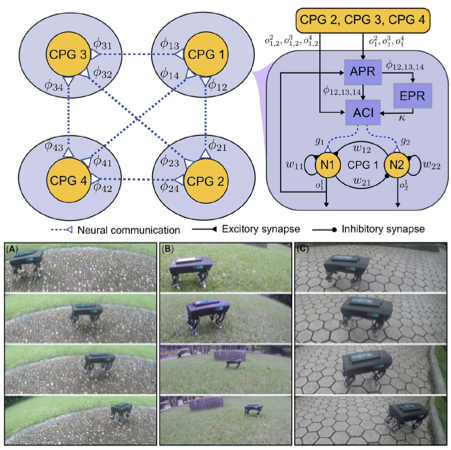
Robust and Reusable Self-organized Locomotion of Legged Robots
For more details, see Sun et al., Front. Neural Circuits 2023
2022

Rigid and Soft Tails in Gecko-Inspired Climbing Robots
For more details, see Zang et al., Front. Bioeng. Biotechnol. 2022

Gecko-inspired robot and its sensor-driven neural control for slope climbing with body height adaptation.
For more details, see Shao et al., Bioinspiration and Biomimetics., 2022 [Video]
2021
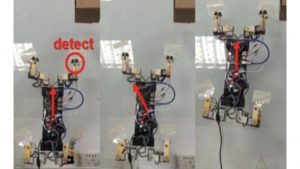
Bio-inspired adhesive feet of climbing robots on smooth vertical surfaces.
For more details, see Borijindakul et al., Front. Bioeng. Biotechnol., 2021
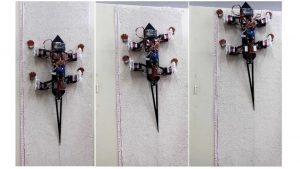
Gecko-inspired bendable body with lateral undulation for energy-efficient inclined surface climbing of a gecko robots.
For more details, see Haomachai et al., IEEE Robotics and Automation Letters, 2021[Video]
2020

Autonomous online adaptation of a walking robot under bioinspired adaptive locomotion control.
For more details, see Ngamkajornwiwatet al., IEEE Access, 2020 [Video1, Video2]

Novel hybrid soft-rigid foot with dry adhesive material for a gecko-inspired climbing robot.
For more details, see Shao et al., IEEE RoboSoft, 2020[Video]

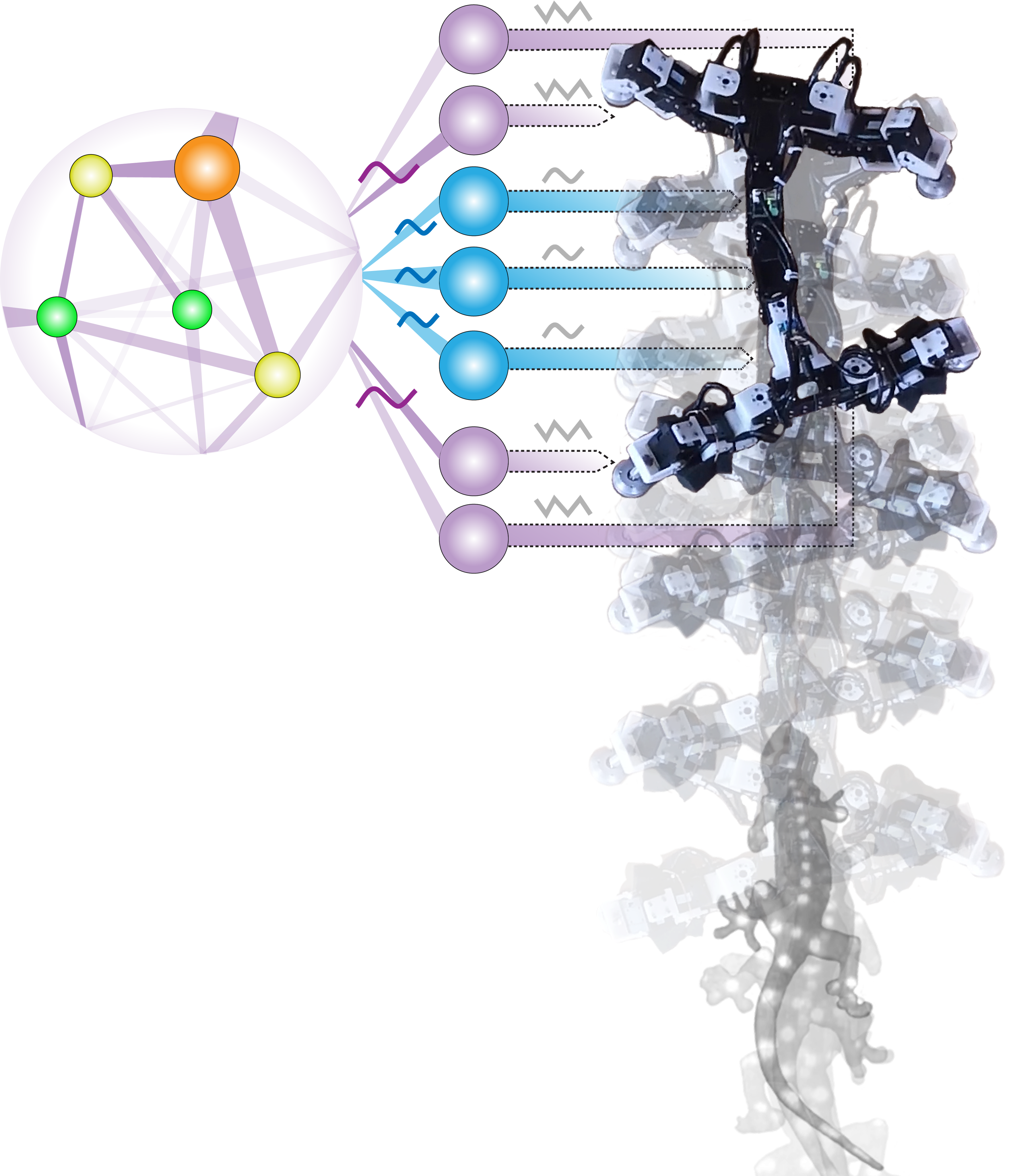
Small-sized and lightweight quadruped robot serving as a generic robot platform for research and education in the fields of robot locomotion, bionic control, and machine learning.
For more details, see Sun et al., Front. Neurorobot., 2020
2019
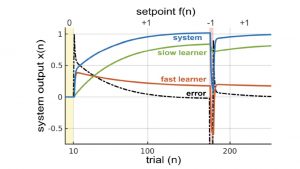
Novel fast online learning based on error feedback for adaptive robot motor control.
For more details, see Thor and Manoonpong, IEEE Transactions on Neural Networks and Learning Systems, 2019
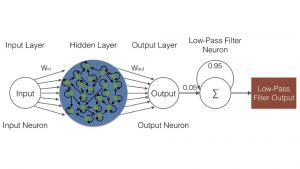
Exploiting neural dynamics of a reservoir computing-based recurrent neural network and haptic feedback to classify multiple terrains.
For more details, see Borijindakul et al., Lecture Notes in Computer Science,2019
2018
A bio-inspired climbing robot with flexible pads and claws that can climb on rough walls.
For more details, see Ji et al., J Bionic Eng, 2018
Adaptive neural control for self-organized locomotion and obstacle negotiation of quadruped robots.
For more details, see Sun et al., IEEE International Symposium on Robot and Human Interactive Communication, 2018 [Video1, Video2]